
CIAMS / Plateforme GIBSON
Plateforme technologique
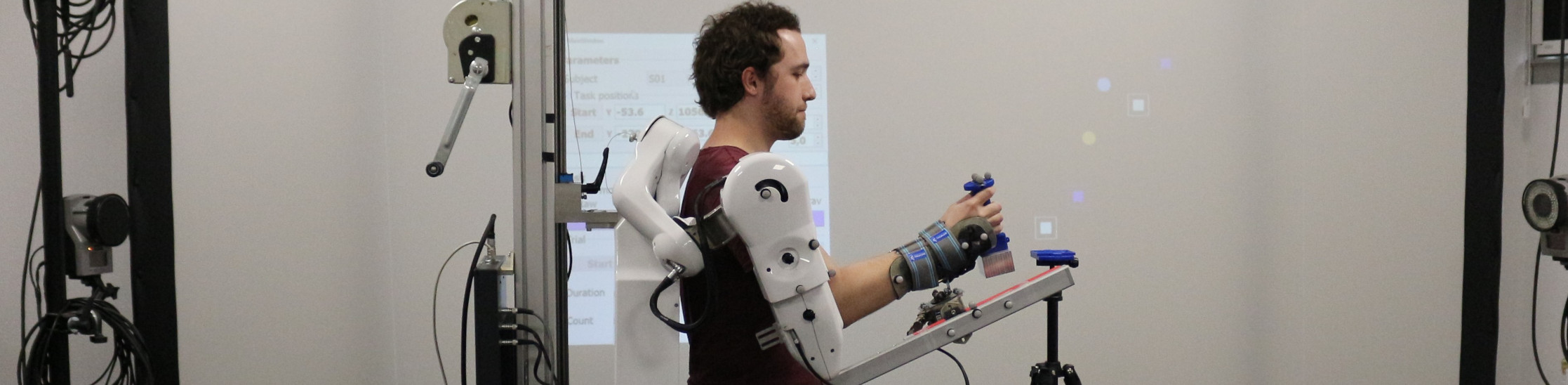
La salle Gibson intègre plusieurs robots exosquelettes et manipulateurs pour étudier le contrôle moteur humain et ses adaptations lors de l'interaction, notamment avec des robots. Un robot exosquelette ABLE à 4 degrés de liberté, possédant des actionneurs réversibles et des capteurs de force/moment pour mesurer les efforts d'interaction, peut être couplé à des systèmes de motion capture Qualisys et EMG (Cometa ou Delsys).
La plateforme inclut aussi deux robots exosquelettes du poignet à 1 degré de liberté (HRX-1). Ces derniers possèdent un capteur de couple et sont contrôlés via Matlab/Simulink. Un robot manipulateur UR5 à 5 degrés de liberté complète la plateforme. Un grand écran et un vidéoprojecteur sont utilisés pour afficher des stimuli lors des expérimentations. L'ensemble est utilisé pour mener des études de neurosciences du mouvement, d'interaction physique humain-robot ainsi que de psychophysique, de la perception à l'action.
La plateforme inclut aussi deux robots exosquelettes du poignet à 1 degré de liberté (HRX-1). Ces derniers possèdent un capteur de couple et sont contrôlés via Matlab/Simulink. Un robot manipulateur UR5 à 5 degrés de liberté complète la plateforme. Un grand écran et un vidéoprojecteur sont utilisés pour afficher des stimuli lors des expérimentations. L'ensemble est utilisé pour mener des études de neurosciences du mouvement, d'interaction physique humain-robot ainsi que de psychophysique, de la perception à l'action.
Laboratoire de rattachement
Rue Pierre de Coubertin
Bat 335, Université Paris Saclay
91400 Orsay
Technologies utilisées
- 10 caméras Oqus 5+ de Qualisys- 1 robot exosquelette ABLE à 4 degrés de liberté
- 2 robots exosquelettes du poignet à 1 degré de liberté (HRX-1)
- 1 robot manipulateur UR5 à 5 degrés de liberté
- Systèmes EMG Cometa et Delsys
Mots clés
Equipements spécifiques
| Nom | Modèle | Marque |
|---|---|---|
| Caméra Infrarouge | Oqus 5+ | Qualisys |
| EMG | Trigno | Delsys |
| Exosquelette | ABLE | Haption |
| Robot | HRX-1 | HumanRobotix |
| Robot | UR5 | Universal Robots |
Types de prestations
- Collaboration de R&D
Etablissements de rattachement
Département(s) de recherche
- MEP (Mécanique, Energétique et procédés)
Réseaux
- Fédération Demenÿ-Vaucanson